|
Email / Google Scholar / Github / LinkedIn / Twitter |
 |
|
I'm interested in computer vision and robotics. Currently, I'm working on 3D generative diffusion model, neural SLAM, scalable 3D scene representation, also interested in bringing large visual/language priors into 3D vision and robotics to achieve high-level intelligence. My research objective is to build intelligent robots capable of continuously learning and perceiving the real world as humans do, which is hard but worthwhile. |
 |
CausNVS is an autoregressive diffusion model for next novel view synthesis with relative pose encoded attention (CaPE) and efficient KV cache inference, towards real-time world modelling, AR streaming and interactive online generation. |
 |
EscherNet is a multi-view conditioned diffusion model for view synthesis. EscherNet learns implicit and generative 3D representations coupled with the camera positional encoding (CaPE), allowing continuous relative camera control between an arbitrary number of reference and target views. |
 |
We present vMAP, an object-level real-time mapping system, with each object represented by a separate MLP neural field model, and object models are optimised in parallel via vectorised training. |
 |
We use a quadruped robot to complete a pedestrian-following task in challenging scenarios. The whole system consists of two modules: the perception and planning module, relying on the onboard sensors. |
 |
We present a novel semantic-aided LiDAR SLAM with loop closure based on LOAM, named SA-LOAM, which leverages semantics in odometry as well as loop closure detection. |
 |
Based on theoretical and empirical evidence, we present HR-Depth, for high-resolution self-supervised monocular depth estimation. |
 |
We propose a novel semantic graph based approach for large-scale place recognition in 3D point clouds. A novel semantic graph representation and a fast and effective graph similarity network is presented. |
 |
We propose a framework to achieve point-wise semantic segmentation for 3D LiDAR point clouds. |
{kind=link}
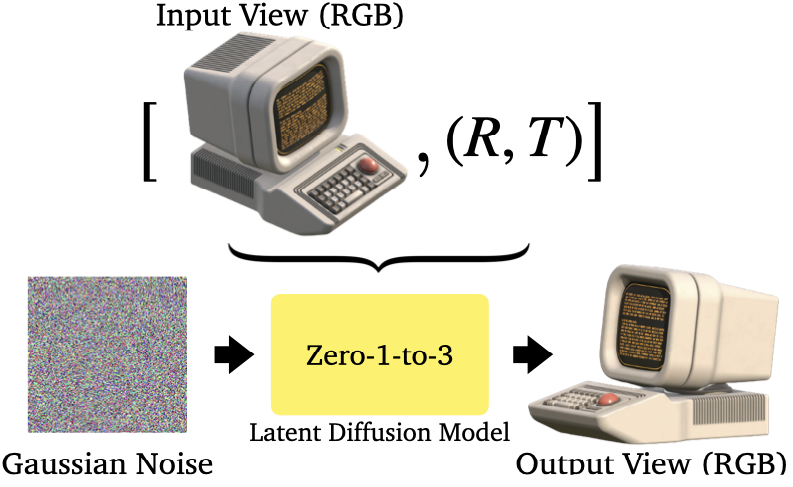 |
A Hugggingface Diffusers (merged) implementation of original Zero-1-to-3. Zero-1-to-3 is a large-scale diffusion models that can control the camera perspective, enabling zero-shot novel view synthesis and 3D reconstruction from a single image. |
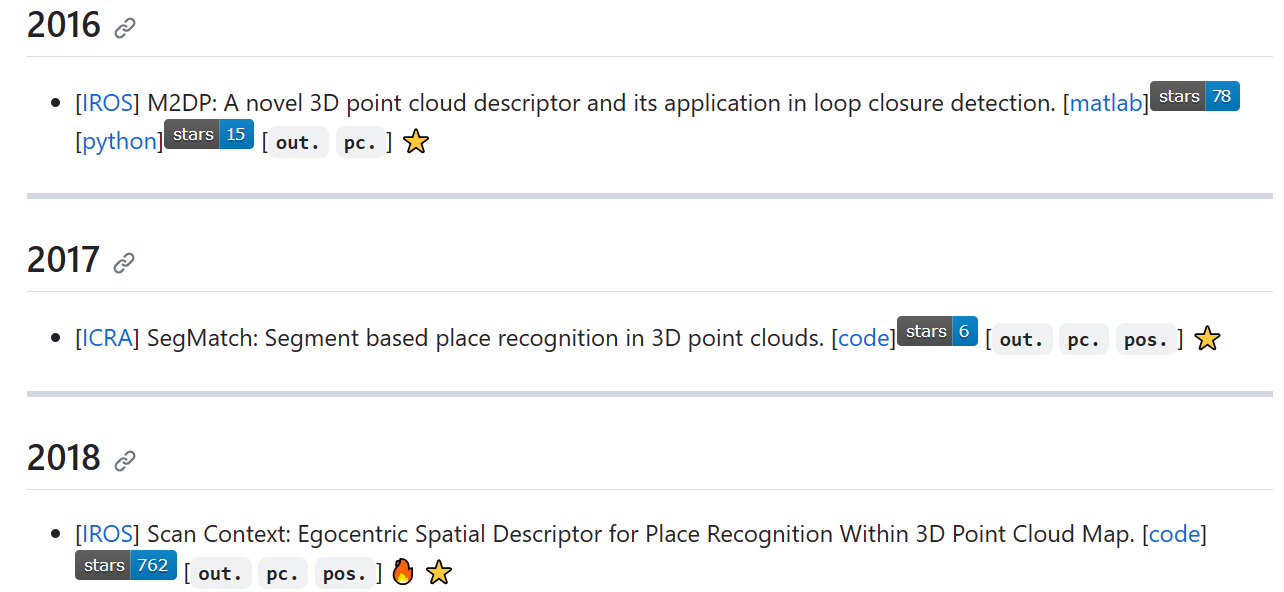 |
A list of papers about point cloud based place recognition, also known as loop closure detection in SLAM. |
 |
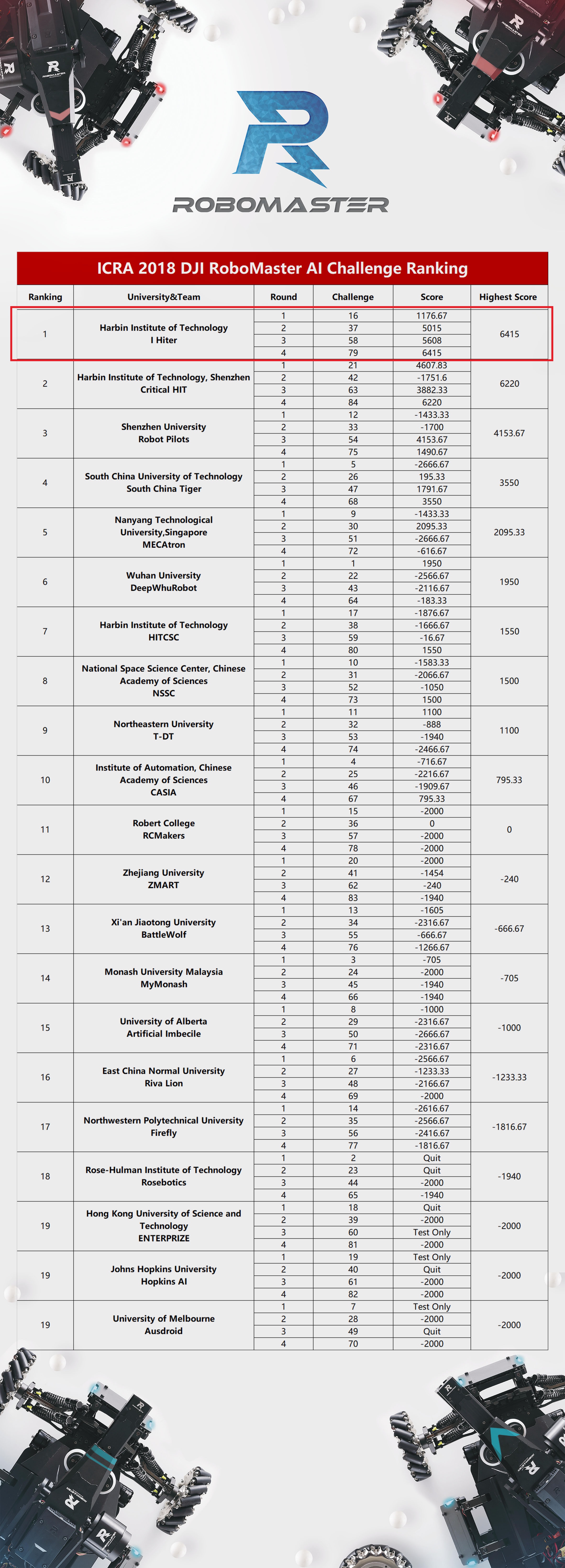
Our team built two fully automatic robots, including machinery, circuit, control and algorithm. I was responsible for visual servo, localization, navigation and decision-making of robots. |
 |
Our team built more than 10 complex automatic or semi-automatic robots. I was responsible for visual servo, which involves computer vision, RGB-D camera calibration, machine learning, multithreaded programming, ballistic model modeling, etc. |
 |
Our team modeled the practical problems (Managing The Zambezi River) proposed by COMAP into mathematical models. Through background research, reasonable assumptions and optimization analysis, a solution to the problem was obtained. |
 |
Our team modeled the practical problems (Mooring System Design) proposed by CSIAM into mathematical models. Through background research, reasonable assumptions and optimization analysis, a solution to the problem was obtained. |
 |
I was a echelon member of the vision group to help the official team members with Ubuntu environment building, camera calibration, and computer vision algorithm testing. Thanks to my seniors for their careful guidance! |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
Team: HITCRT. Xingguang Zhong, Xin Kong, Chen Yao, Yide Liu, etc. National Innovation Training Program, 2016. Harbin, China. Bronze Prize of University Zuguang Cup Our team designed an automatic dustin robot that can catch objects. I was in charge of Kinect development, RGB-D camera calibration, moving object tracking, and trajectory prediction. |
 |
Our team designed and implemented an automatic book sterilizer to protect books by cleaning up the bacteria and dust in books. Patent No. ZL 2015103334672. |
{kind=link}
{kind=link}
|
May. 2021, Sun Youxian (Academician of the Chinese Academy of Engineering) Scholarship. Nov. 2018, Academic Scholarship - Zhejiang University. May. 2018, Outstanding Graduate - Harbin Institute of Technology. May. 2018, 3rd Prize of Innovation Scholarship - Ministry of Industry and Information Technology. Nov. 2016, 8841 Impact Scholarship - Harbin Institute of Technology. |
|
Skills:PyTorch/TensorFlow/JAX, TPU/GPU Training, Python/C++, Linux, ROS, OpenCV/PCL, Matlab Languages: Chinese: Native. English: Professional Proficiency. |
|
|
「Talk is cheap. Show me the code.」 Last update: 2024.02.06. Thanks. |